3Dスキャンの点群編集について
点の生成
スキャンされたデータは、最初に生のセンサーデータとして取得されます。このデータは、対象物の表面の特定の位置を示す一連の点に変換されます。各点は、3次元空間内の座標(X、Y、Z)と、場合によっては色や反射率などの追加属性を持ちます。この変換は、スキャナーからの生の出力を処理して、空間内の点として解釈できる形式に変換するアルゴリズムによって行われます。
点群データの整理
変換された点は集合として管理されますが、この集合は非常に大量のデータを含むことがあり、直接扱うのが難しい場合があります。点群データの整理には、ノイズの削減、アウトライヤーの除去、データのダウンサンプリングなどが含まれることがあります。これにより、データの品質が向上し、後続の処理が容易になります。
解析と活用
整理された点群データは、CAD(コンピュータ支援設計)ソフトウェア、3Dモデリングツール、またはシミュレーション環境で使用するためにさらに加工されることがあります。これらのデータは、リバースエンジニアリング、バーチャルリアリティ、拡張現実、建築や製造のプロジェクトなど、多岐にわたる用途で活用されます。
技術の進歩
スキャンから点群データへの変換プロセスは、技術の進歩によって継続的に改善されています。新しいスキャニング技術、より高速で正確なデータ処理アルゴリズム、そして大量の点群データを効率的に扱うための新しい方法が開発されています。これらの進歩は、スキャン技術の適用範囲を広げ、さまざまな分野での使用を促進しています。
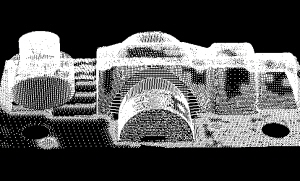
点群はコンピュータデータ点の集合体、点の密度が高くなればなるほどに高精度のデータとなります。
3次元CADで利用するのは高精度データが必要のため専用のスキャナーで測定する。点群をCADに取り込んでもシミュ―レーションで見るだけのデータになり、点群のままでは各種の三次元処理には適さない。
CADでポリゴンメッシュに変換やサーフェスやソリッドのモデリングが必要になります。
| <トップページ> |