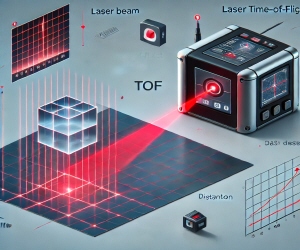
具体的なプロセスは次の通りです:
レーザーの発射: 光源からレーザーパルスが物体に向かって放たれます。
反射の計測: レーザーパルスが物体に当たって反射し、センサーに戻ってくるまでの時間を計測します。
距離の計算: その時間を基に、光速(約30万km/s)を使って距離を計算します。
この技術は、3Dスキャン、LiDAR(Light Detection and Ranging)やロボットナビゲーション、自動運転車、スマートフォンのカメラなど、さまざまな分野で利用されています。飛行時間方式は特に、遠距離の物体の計測に強みがあり、高速で広範囲のデータを取得できるという利点があります。
【ロボットナビゲーション】
自律型ロボットが環境内を移動し、目的地に到達するためのプロセスや技術を迂回します。この分野は人工知能(AI)、機械学習、センサー技術、ロボティクスなどの分野と深い関連があります。
1.ナビゲーションロボットの基本構成
ロボットがナビゲーションを行うためには、次の3つの基本要素が必要です:
- 位置推定(Localization) : ロボットが自分の訪問を知る。
- 考え方(Mapping) : 環境の地図を作成または利用。
- 経路計画(Path Planning) : 目的地までの経路を計算し、安全に移動。
2.主なナビゲーション技術
(1)センサー技術
ロボットは以下のようなセンサーを使って周囲の情報を取得します:
- LiDAR(ライダー) : 距離を測定し、周囲の詳細な3Dマップを作成します。
- カメラ:画像認識や視覚情報に基づくナビゲーション。
- 超音波センサー: 障害物検知。
- IMU(慣れ性測定装置) : 動きや方向を感覚で知る。
(2)SLAM(同時位置推定と地図作成)
ロボットが位置推定と考えるを同時に行う技術。特に未知の環境が重要で、LiDARやカメラを使用します。
(3)経路計画アルゴリズム
- A*アルゴリズム:グリッドベースの効率的な経路計画。
- ダイクストラ法: 最短経路探索。
- RRT(Rapidly-Exploring Random Tree):ロボットの動きに適した柔軟な探索。
(4)動的障害物回避
- 動的環境での障害物を瞬時に回避するために、AIや深層学習が利用される。
3.ナビゲーションロボットの応用例
- 自動運転車:周囲の状況を把握し、安全に移動。
- 倉庫ロボット: パッケージのピッキングや配送。
- 掃除ロボット:家庭内のゴミを効率的に清掃。
- 災害時のロボット: 複雑な地形での探索と挑戦。
4.現在の課題
- 即処理: 考えるようなデータを短時間で処理する必要がある。
- 未知の環境での限界性:動的で予測不可能な環境への対応。
- エネルギー効率:長時間動作できるバッテリー管理。